
DKJ型电动角行程执行机构工作原理
电动执行机构是用电源作为动力源的执行机构。电动执行机构按结构可分为蛆合式结构和机电一体化结构。按控制方式可分为电气控制型和智能控制型。按信号类型可分为数字型和模拟型。按行程方式分为直行程、角行程和多回转等。按极性可分为正作用和反作用执行机构。按速度可分为恒速和变速执行机构。

图1 DKJ型电动角行程执行机构产品图
上海川沪阀门产的DKJ型电动角行程执行机构是以两相伺服电动机为动力的位置伺服 机构。它的输出角位移小于360°,常用于驱动蝶阀、球阀、偏心旋转阀等角行程调节机构。图2是其原理框图
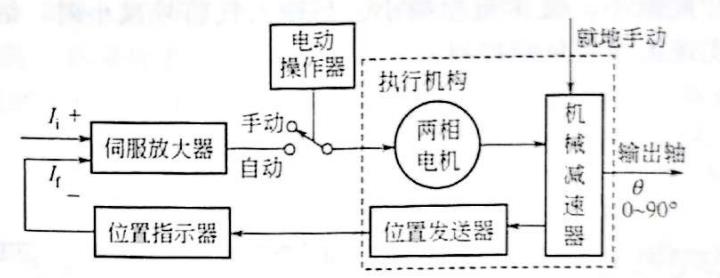
图2 DKJ型电动角行程执行机构原理框图
伺服放大器接收输入电流信号Ii,它与来自执行机构位置发送器的反馈电流信号入比较,将其偏差信号转换和放大后駆动两相伺服电机转动,经减速器减速后带动输出轴转动, 改变输出转角。该转角的改变,经位置发送器按比例转换为位置反馈信号,用于与输入信号比较。
当输入信号电流与反馈信号电流的偏差在规定的伺服放大器不灵敏区范围内时,两相伺服电机停转,输出轴稳定在与输入信号对应的位置。
不考虑伺服放大器不灵敏区,稳态时.比例式执行机御输出轴转角0与输入信号Ii之间 关系如下。
0 = KIi
式中 K——是电动执行机构的静态传递系数.对DDZ-III型仪表.其值为90°/16mA。
积分式执行机构输:.H转角是转速对时间的积分・常用F远距离遥控。
伺服放大器。伺服放大器由前置磁放大器、触冷器、可控硅主回路和电源等组成。为适应复杂的多参数调行的应用,伺服放大器一般设置三个输入信号4-20mA信号通道和一个位置反馈信号通道。
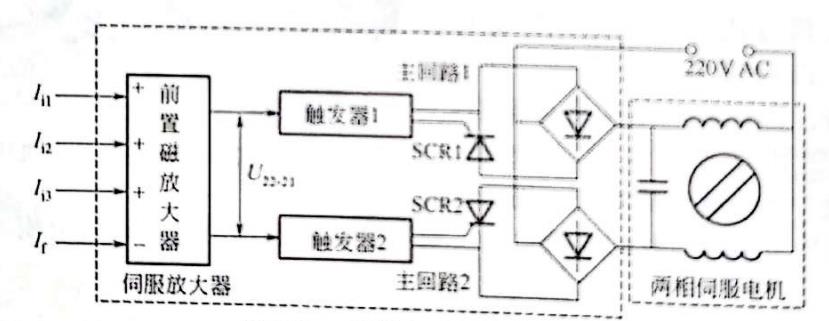
图3 伺服放大器的原理框图
图3是伺服放大器的原理框图,三个输入电流信号Ii1-li3和一个电流反馈信号Ii在伺服放大器内比较,其偏差△I经放大为电压信号U22-21,该输出电压同时送两个触发器,转换为触发脉冲信号,控制两个可控硅主回路,将交流电源施加到两相问服电机绕组,驱动电机转动。